
手術支援ロボット
「 ダビンチ(Da Vinci)Xⅰ」導入
大阪東部地域ではまだ数が少ない手術支援ロボット「ダビンチ」を石切生喜病院にて稼働中です。
ダビンチとは
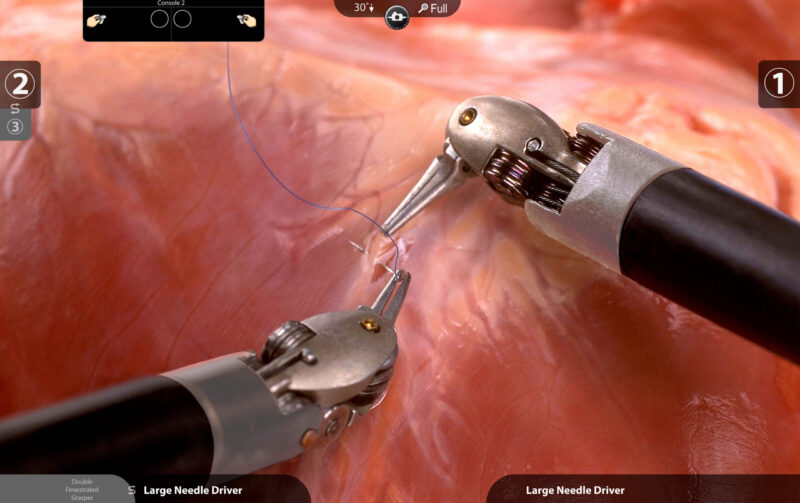
ダビンチはアメリカで開発された手術支援ロボットで、ダビンチXiは第4世代にあたる最新鋭機です。患者さんへの身体的な負担が少ない腹腔鏡下手術の特長を生かしつつ、ロボットの機能による支援によって、従来不可能とされていた手術操作が可能になりました。
ダビンチは3つの機械から成り立っており、医師はロボットのアームについている鉗子やカメラを遠隔操作して手術を行います。ダビンチのみで手術が行われるわけではなく、患者さんの脇に助手の医師と看護師がついて補助しながら手術が行われます。
ダビンチはサージョンコンソール、ペイシェントカート、ビジョンカートの3つの機器によって構成されています。
ダビンチは3つの機械から成り立っており、医師はロボットのアームについている鉗子やカメラを遠隔操作して手術を行います。ダビンチのみで手術が行われるわけではなく、患者さんの脇に助手の医師と看護師がついて補助しながら手術が行われます。
ダビンチはサージョンコンソール、ペイシェントカート、ビジョンカートの3つの機器によって構成されています。

1サージョンコンソール

2ペイシェントカート

3ビジョンカート
- 「サージョンコンソール」とよばれる操縦席に座り、3D画像を見ながら手元のコントローラーを操作します。
- 「ペイシェントカート」の4本のロボットアームにその動きが伝わります。
- 「ビジョンカート」のモニターに手術中の画像が映し出され、手術スタッフも同じ画像が共有されます。
特徴
身体への負担が少ない
鉗子を挿入するための小さな穴を数か所切開するのみであり、傷が小さく、出血量が抑えられるため、手術後の回復が早く、身体への負担を軽減することができます。


鮮明な3D(3次元)画像
従来の腹腔鏡手術では、術者は2次元の画像を見ていましたがダビンチのコンソールモニターには高画質で立体的な3次元立体画像が映し出されるため奥行きを感じながら操作でき、より正確かつ安全な手術が可能となります。

鉗子の操作精度、自由度が高い
医師がロボットアームに装着されている鉗子やメスを操作します。ダビンチの鉗子はリスト構造を持ち、人間の手より大きな可動域で術者の思うままに、まさに熟練した医師の手のような操作が可能で、かつ、手ぶれ補正がかかっているため正確な手術が可能となります。

対応診療科
泌尿器科
ロボット支援手術は欧米を中心に平成12年初め頃から主に前立腺全摘除術と共に普及してきました。前立腺は骨盤の一番奥に位置し、周囲には血管や神経がまとわりついており、開腹手術が行われていた時代には大出血してしまうこともありました。また前立腺を摘除すると膀胱と尿道が離れてしまうため、つなぎ合わせる必要があります。この膀胱と尿道の吻合は非常に難易度が高い手技です。ロボット支援手術を行うことにより出血量を減らし、繊細で確実な吻合が可能となり、術後の尿失禁を減らすことができます。またロボット支援手術を選択された患者さまでは勃起神経を温存することが可能となり、QOL(生活の質)の維持が期待できます。
対応疾患:前立腺がん、腎がん

導入準備チーム
消化器外科
昨今、消化器外科手術領域において腹腔鏡下手術が一般的になり、さらに近年では3D画像、操作鉗子の関節機能、手振れ補正機能を有したロボット支援下手術が導入されつつあります。
上記の機能により消化器外科領域の手術では従来の手術に比べ様々な優位性が指摘されており、当科でも令和5年3月からロボット支援下直腸癌手術を、令和6年1月からロボット支援下結腸癌手術を開始しております。従来の開腹手術や腹腔鏡下手術では実現不可能であった視野確保や手術操作が可能となり、より安全でより根治性の高い手術が実現可能になると考えます。今後、当院では、これら優位性を生かし胃癌にも適応を広げていく予定です。
対象疾患:すべての大腸がん(直腸がん・結腸がん)・胃がん

呼吸器外科
呼吸器外科でもロボット支援手術を令和5年4月から開始しております。泌尿器科・消化器外科より少し開始時期が遅れたのは、気管支形成を含め、ほぼ全ての手術を完全胸腔鏡下手術で行なってきた経緯があり、全く別のアプローチとなるロボット支援手術は患者さんへのマイナス要素が多くなるのではと懸念していたからでした。しかしこの解決法を見つけ出す事ができたこの春、完全胸腔鏡下手術のノウハウを活かしたロボット支援手術を行うことで、さらに進化した呼吸器外科手術を行えると考えています。
対応疾患:肺がん

関連リンク



 外来診察スケジュール
外来診察スケジュール 休診・担当医変更の案内
休診・担当医変更の案内 病院までの地図・アクセス
病院までの地図・アクセス 無料送迎バス
無料送迎バス-
 診察時間
診察時間朝診 受付7:00 - 12:00
診察開始 9:00 ~昼診 受付13:00 - 16:00
診察開始 14:00 ~ ※予約のみ夜診 受付16:00 - 19:30
診察開始 18:00 ~
※月・水・金曜は夜診休診 電話番号072-988-3121
電話番号072-988-3121 休診日土曜午後、日曜、祝日、年末年始
休診日土曜午後、日曜、祝日、年末年始